IMoSA – Imitation Mechanisms and Motor Cognition for Social Embodied Agents
Amir Sadeghipour and Stefan KoppAbstract
This project explores how the brain's motor cognition mechanisms--in particular, overt and covert imitation or mental simulation--are employed in social interaction and can be modeled in artificial embodied agents. Taking a novel perspective on communicative gestures, we develop a hierarchical probabilistic model of motor knowledge that is used to generate behaviors and resonates when seeing them in others. This allows our virtual robot VINCE to learn, perceive and produce meaningful gestures incrementally and robustly in social interaction.
Research Questions and Methods
VINCE, a humanoid virtual agent.
Outcomes
The model has been implemented at the levels of motor commands, motor programs and (to some extent) motor schemas. It has been tested against real-word hand-arm gesture data in an imitation game scenario with the virtual robot VINCE. The hierarchical structure of the motor knowledge together with its role as link between behavior perception and generation are found to support the basic processing of social behavior and, additionally, core mechanisms of social interaction, from alignment and mimicry to imitation learning and understanding behaviors through embodied simulation. Bottom-up processing realizes fast, incremental behavior recognition and interpretation; top-down flow of activation realizes behavior generation and simulate attentional and perceptual biases during perception. Overall, this approach takes a novel, integrated perspective toward gesture processing in an embodied manner. See publications for results on the performance of the model during social interaction, in terms of recognition, imitation learning and alignment; see an older version of the interaction scenario in the video.
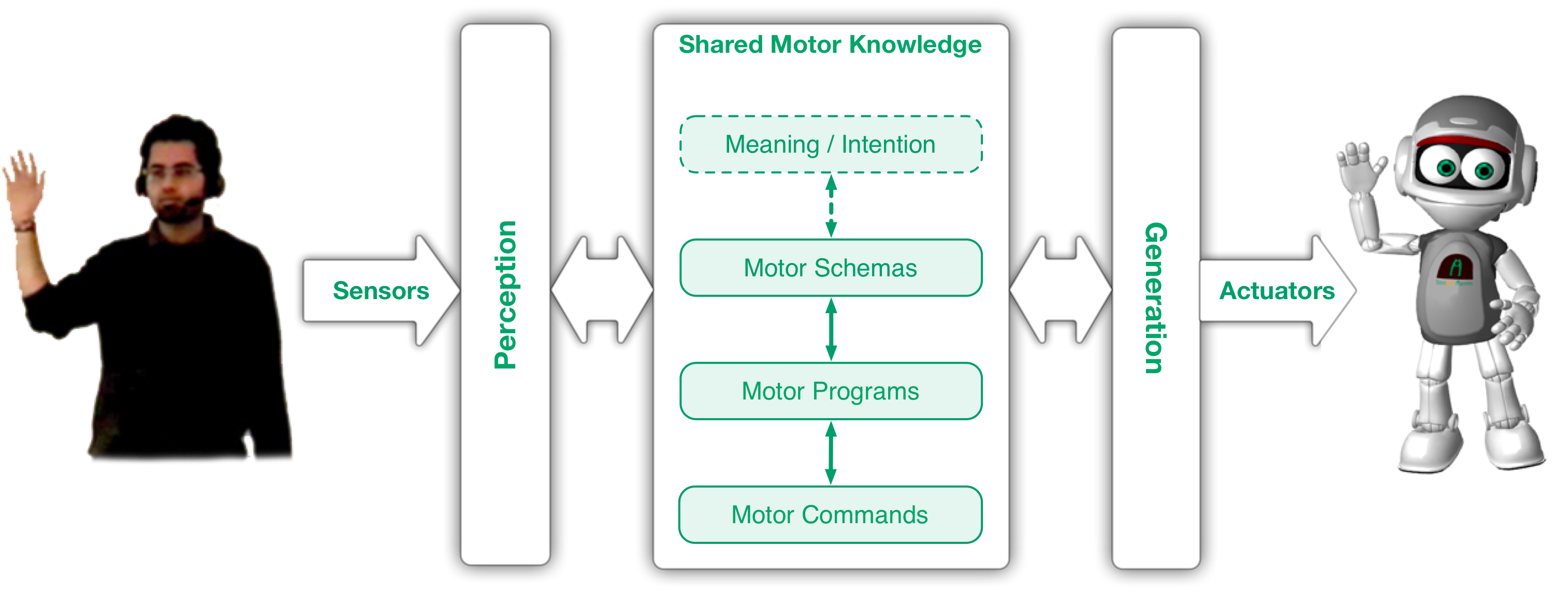
The overall model for embodied gesture perception and production grounded in a shared motor knowledge.
Video
Publications
-
A. Sadeghipour, R. Yaghoubzadeh, A. Rüter, and S. Kopp. Social motorics - towards an embodied basis of social human-robot interaction. Human Centered Robot Systems, pages 193-203, 2009.
[PDF Fulltext] [BibTex Cite] [DOI URL][Wordle]
-
S. Kopp, K. Bergmann, H. Buschmeier, and A. Sadeghipour. Requirements and building blocks for sociable embodied agents. KI 2009: Advances in Artificial Intelligence, pages 508-515, 2009.
[PDF Fulltext] [BibTex Cite] [DOI URL][Wordle]
-
A. Sadeghipour and S. Kopp. A probabilistic model of motor resonance for embodied gesture perception. In IVA '09: Proceedings of the 9th International Conference on Intelligent Virtual Agents, pages 90-103, Berlin, Heidelberg, 2009. Springer-Verlag.
[PDF Fulltext] [BibTex Cite] [DOI URL][Wordle]
-
A. Sadeghipour and S. Kopp. Embodied Gesture Processing: Motor-based Perception-Action Integration in Social Artificial Agents Cognitive Computation, pages 1-17, New York, 2010. Springer.
[PDF Fulltext] [BibTex Cite -> see URL] [DOI URL][Wordle]
last update: 2011-6